
The Navigation Systems Laboratory is oriented to the development of Navigation Systems, Stabilized Platforms as well as other applications which demand the utilization of navigation sensors.
Los sistemas de Navegación permiten guiar a una persona, un vehículo o un robot en un entorno, generalmente con obstáculos. Los sistemas de guiado, navegación y control (GNC) son sistemas que involucran diferentes tecnologías como diseño y planificación de misiones, planificación de trayectorias, localización, mapeo o detección y evasión de obstáculos.
CTC está especializado en aplicaciones basadas en GNSS (GPS, GLONASS, GALILEO), desarrollando soluciones de posición con precisión centimétrica (algoritmos PPP o RTK) o algoritmos capaces de obtener la orientación 3D (ángulos roll, pitch y yaw) basados en sistemas multi-antena. CTC es experto en obtener soluciones basadas en sensores de bajo coste e implementadas en sistemas embebidos con altas restricciones computacionales y de consumo, así como en el modelado e integración de sensores mediante la fusión de datos (sensores inerciales, odometría, etc.).
Para ello, cuenta con una amplia gama de receptores GNSS que va desde receptores multi-constelación y multifrecuencia hasta sensores de tipo “mass market”, así como sistemas de navegación inercial de diversas prestaciones y tecnologías (FOG, MEMS, etc.).
|Equipamiento|

Test-bed for the development of GNSS attitude determination systems and antenna calibration (Phase Center Variation). It includes a high accuracy 2-axis rotary table.
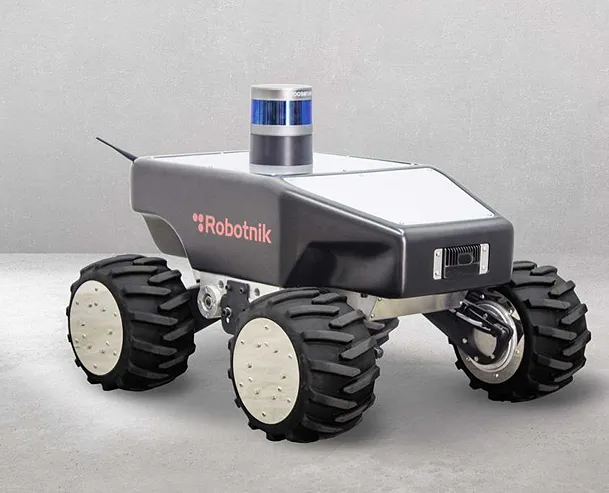
Autonomous ground mobile robot with differential and holonomic movement, equipped with front and top 3D LIDAR sensors providing 360° vision.
ACUTRONIC SIMEX TWO 2-axis motion simulator with removable temperature chamber and 45 kg maximum payload for modeling and calibration of MEMS inertial sensors and stabilized platform testing (Hardware-in-the-loop).
